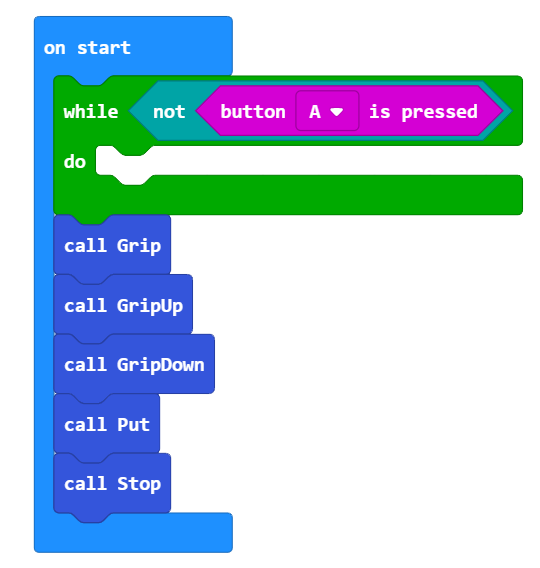
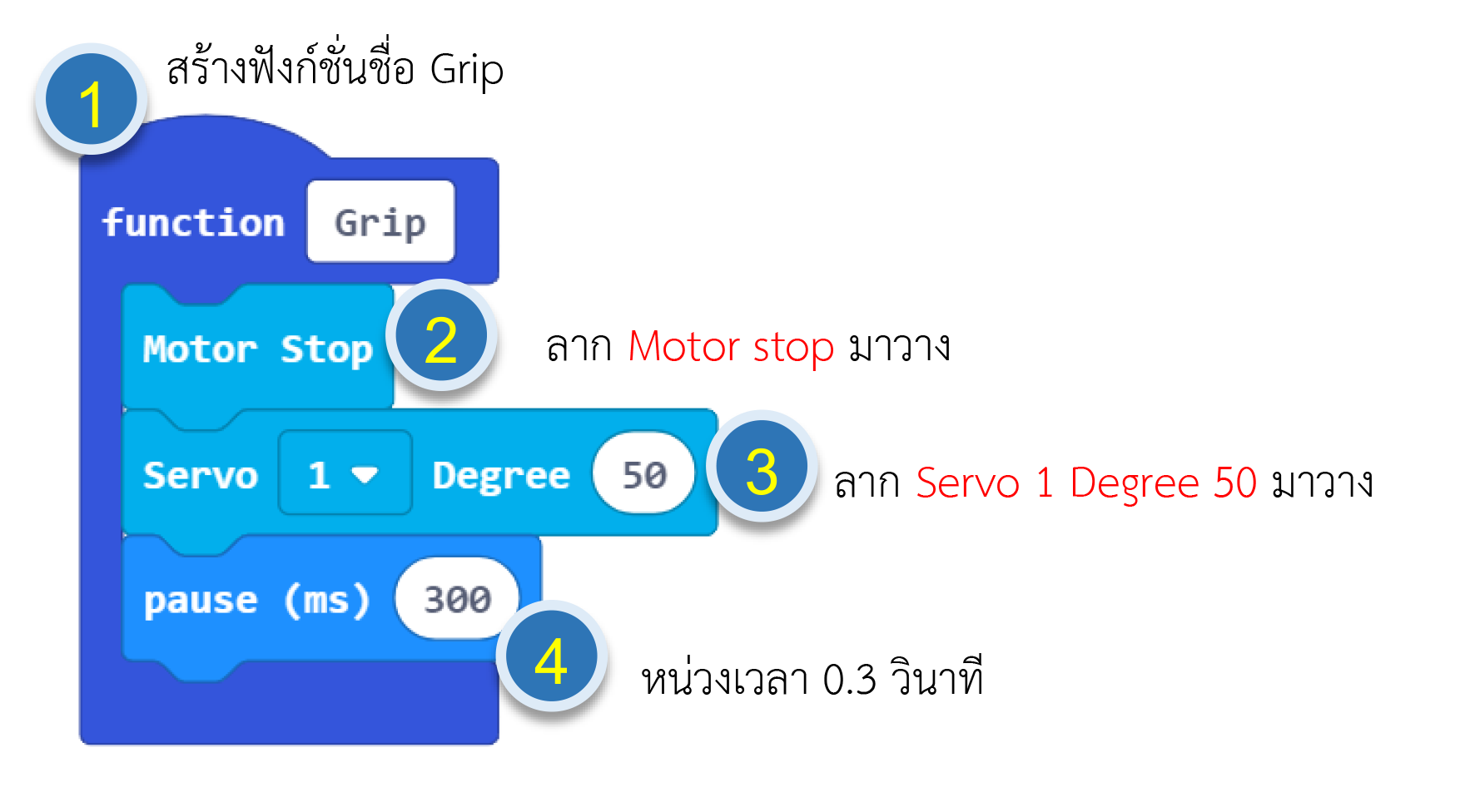
หลัการทำงานของโปรแกรม: เมื่อกดปุ่ม A โปรแกรมจะสั่งให้เซอร์โวช่องที่ 1 เคลื่อนที่ไปยังตำแหน่ง 50 และหน่วงเวลา 0.3 วินาที เพื่อให้ตัวคีบ