|
|
บทเรียนที่ 4 คำสั่งควบคุมมอเตอร์ |
|
หลังจากที่ได้เรียนรู้คำสั่งพื้นฐานเพื่อสร้างหุ่นยนต์เรียบร้อยแล้วในบทเรียนที่
2 และ 3 ในบทเรียนนี้เราจะเรียนรู้ในเรื่องของคำสั่งที่จะใช้ในการ
|
|
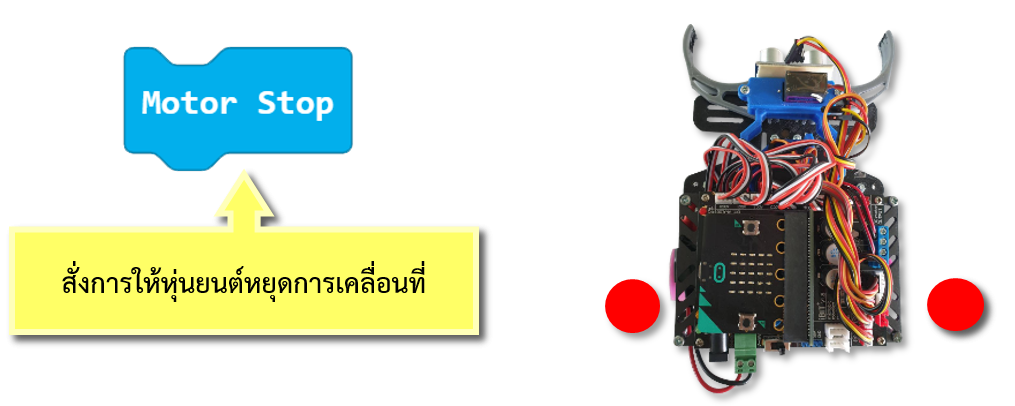
การควบคุมมอเตอร์เพื่อให้หุนยนต์สามารถเคลื่อนที่ได้ |
|
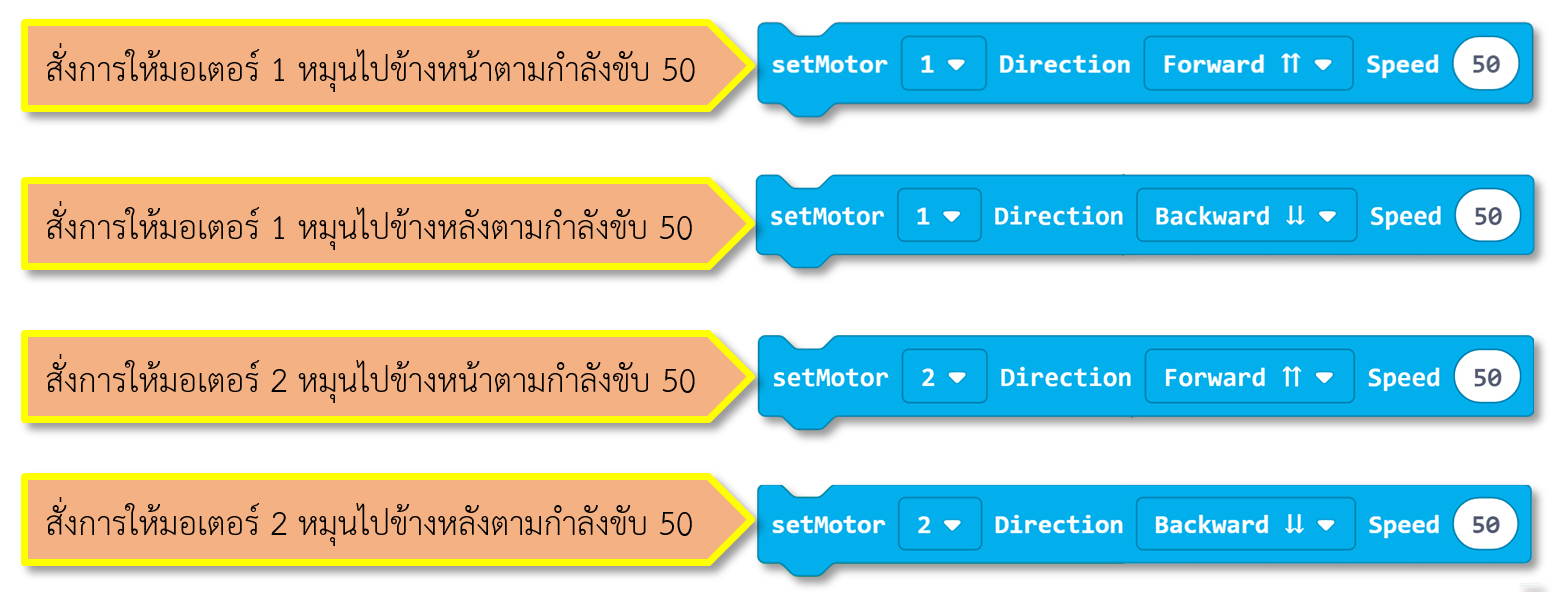
1. ชุดคำสั่งควบคุมมอเตอร์เดี่ยว |
|
คำสั่งสำหรับสั่งการให้มอเตอร์แต่ละล้อเคลื่อนที่ตามที่กำหนด
สำหรับรูปแบบการอ้างอิงของ IBIT คือ |
| |
 มอเตอร์ช่อง
1 ถูกเชื่อมต่อเข้ากับล้อด้านซ้าย มอเตอร์ช่อง
1 ถูกเชื่อมต่อเข้ากับล้อด้านซ้าย |
| |
มอเตอร์ช่อง
2 ถูกเชื่อมต่อเข้ากับล้อด้านขวา |
|
 |
| |
|
| 3.
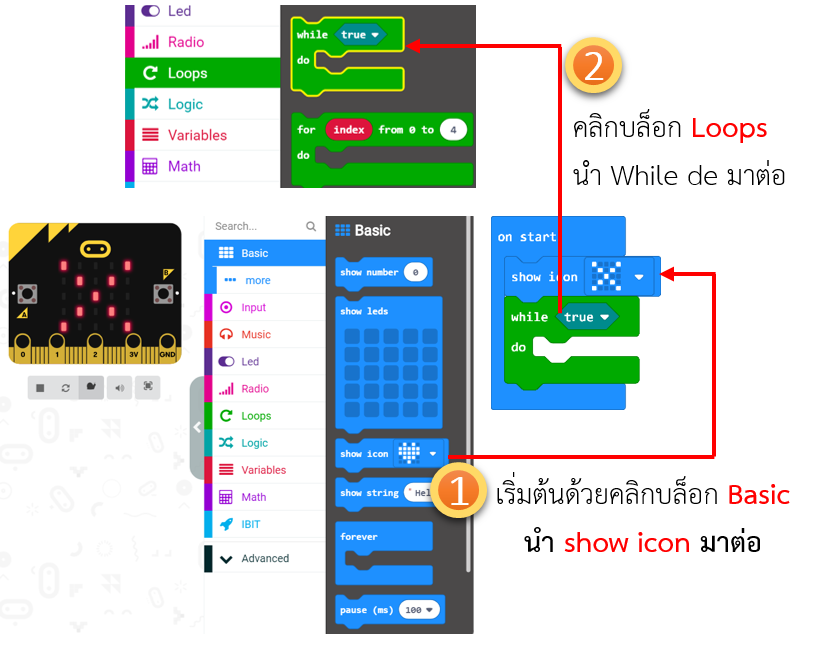
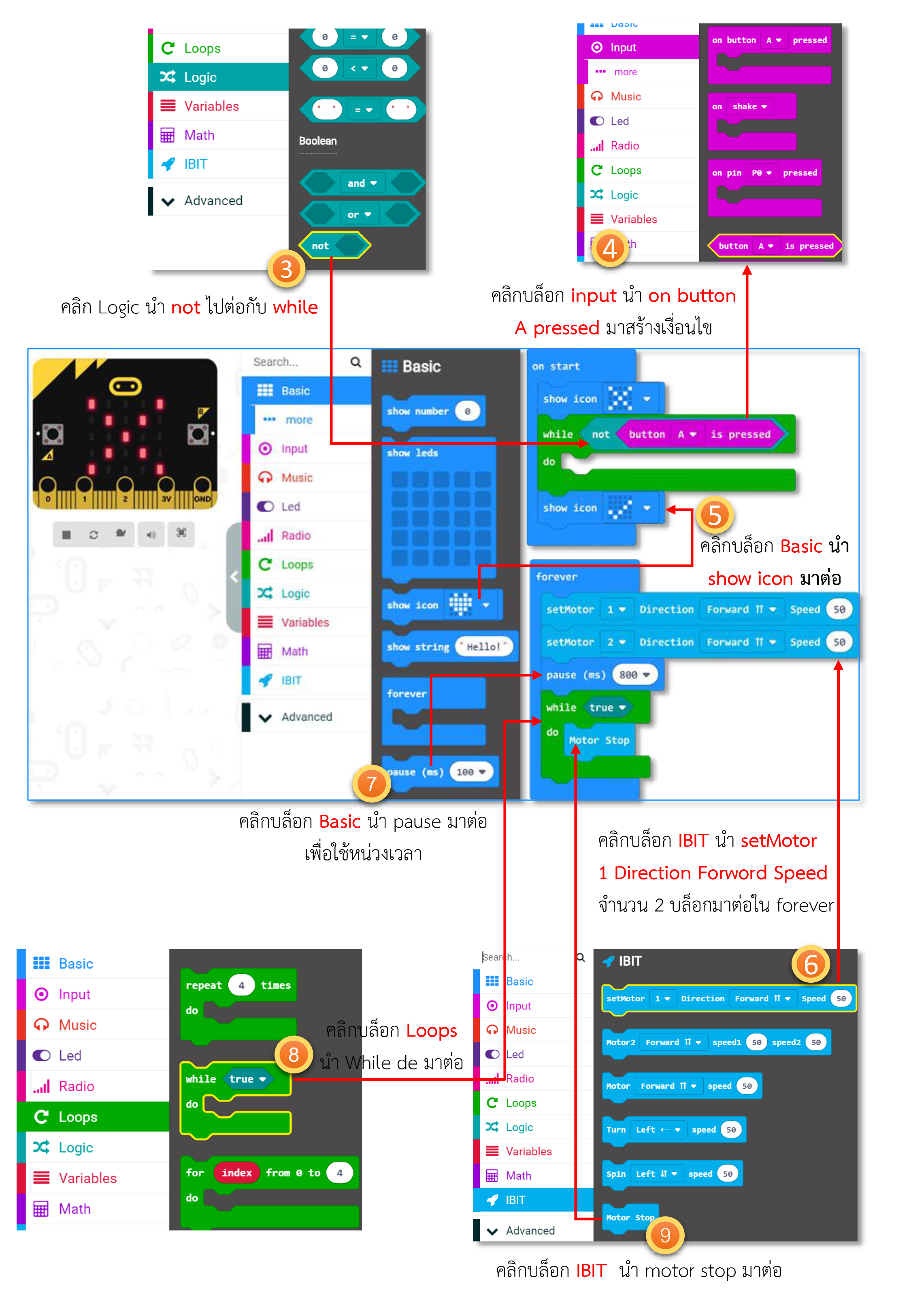
การใช้คำสั่งควบคุมหุ่นยนต์อย่างง่าย |
|
ลักษณะการทำงานของโปรแกรม : เมื่อกดสวิตช์ A
บนบอร์ด microbit จะทำให้มอเตอร์ 1 และมอเตอร์ 2 ทำงานเพื่อบังคับ |
|
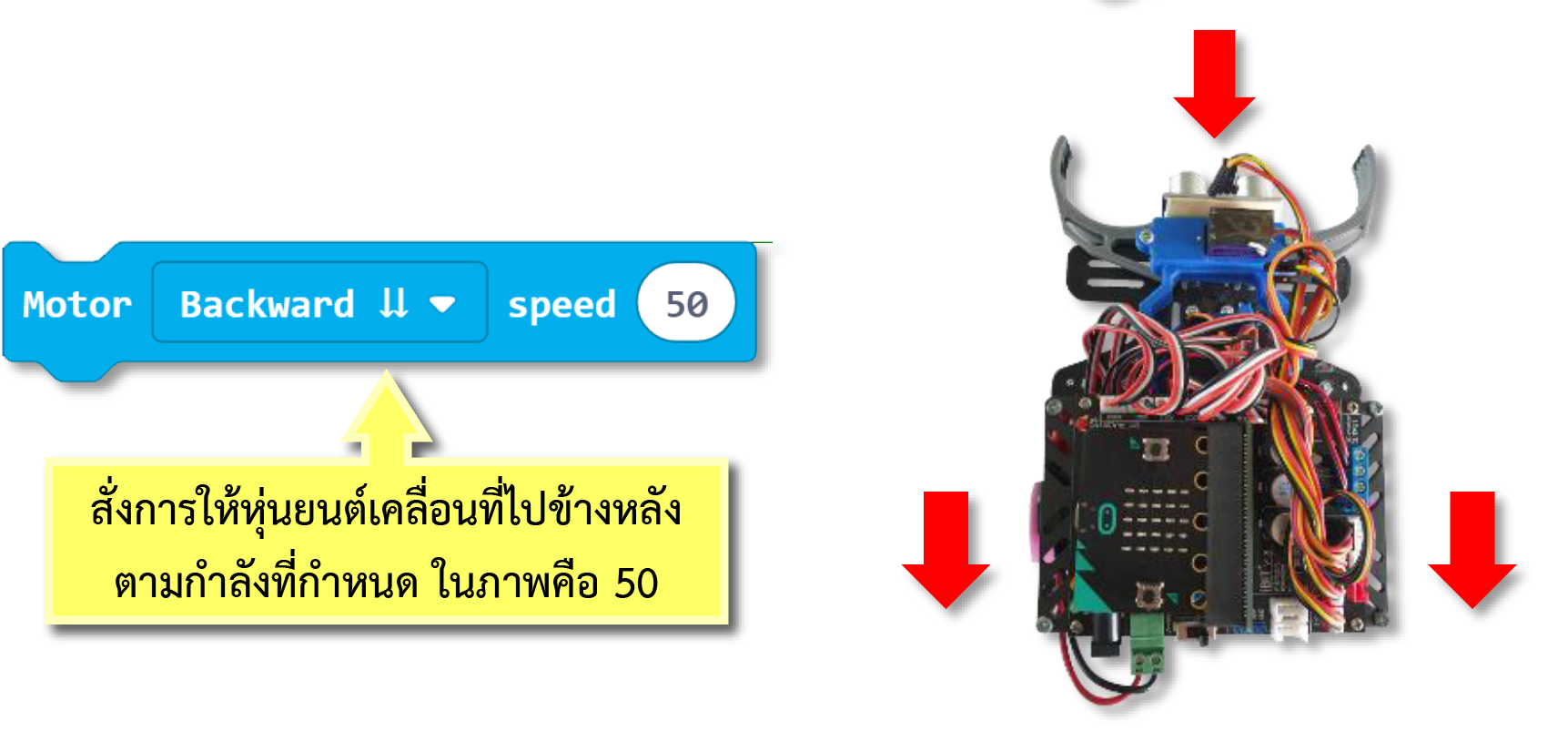
ให้มอเตอร์หมุนไปข้างหน้าด้วยกำลังขับ 50 ต่อ 0.8 วินาที
และหยุดการเคลื่อนที่ ขั้นตอนในการเขียนโปรแกรมมีดังนี้ |
|
 |
| |
| |
|
|
|
|
|